
 Spring 2024 Update
Spring 2024 Update
AutoAquaponics is a project that started during the remote spring quarter in 2020, and our goal is to build and maintain a fully automated aquaponic system in the ESW office that can grow plants unattended for one month, and be monitored and controlled remotely. This quarter, we welcomed our new Co-Project Manager, Hannah Wilks.
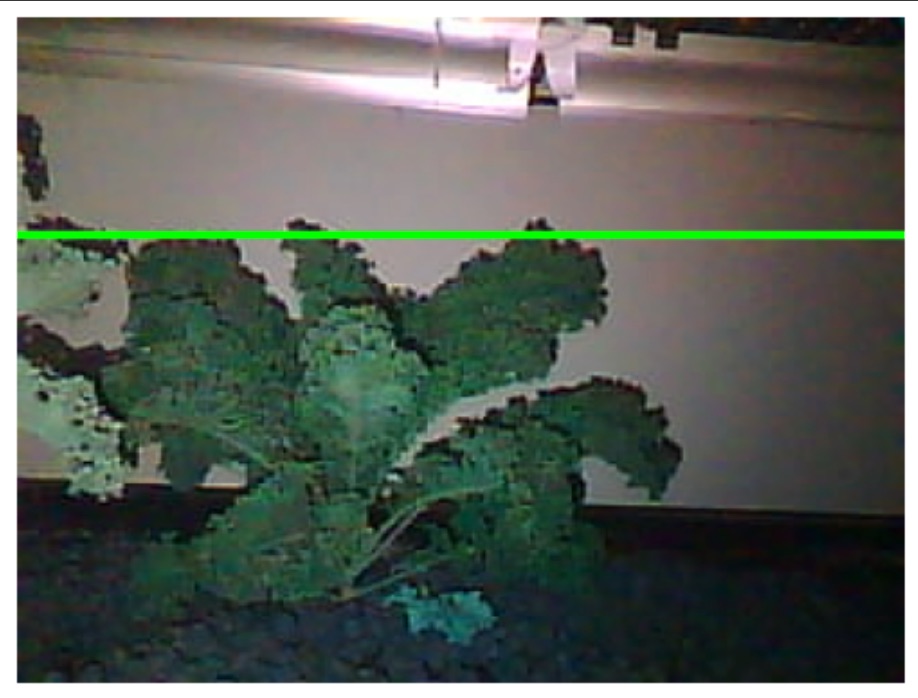

On the software side, we continued updating the official AutoAquaponics website to improve its performance. To implement a live video stream of the system on the website, we developed end-to-end prototypes. We used a Raspberry Pi as a video streaming server and reverse proxies to connect the server to the internet and allow anyone to view the stream! We also added a dark mode to the website so users can now choose between light, dark, and system default. Lastly, our team started the Vertigrow controller model, developing a color–based cross-validation model to visually detect plant presence and height. This quarter was primarily focused on testing: taking a series of images and using the Canny edge-detection algorithm to improve our model. We also began writing logic to maintain optimal light intensity via mechanically adjusting growth light distance from our plants (more in mechanical design).
On the electronics side, we continued to work on improving the outlet box and sensor box, improving the wiring, and updating our pin maps for the system. We hope to grow the team next year with more students interested in electronics and helping to get our sensors back online!

Our biology team hosted a VERY successful harvest day, with healthy (and yummy) kale and basil. We made a kale salad and a caprese salad with this harvest and were able to share our bounty with a variety of Northwestern students! The team also introduced tomatoes to the system, which are successfully growing.

We were able to set up an order to be placed at the beginning of next year for additional grow cubes, a pinch point for increasing the number of plants in the system. We also had a resurgence of the worms that plagued our system last year, defying state-of-the-art ecological data about these worms, and unfortunately taking the lives of one of our cichlids. We were able to isolate the cichlid to the quarantine tank and prevent the parasites from affecting any other fish in the system.
As for mechanical design, we welcomed Aliza Campbell as our new team leader! We introduced more aeration into the bioreactor to improve water circulation and remove stagnation in the bead filters. We finalized the CAD and build of the shrimp cage and are ready to bring moss and shrimp into the system next quarter. We continued work on Vertigrow, an adjustable light above a grow bed to optimize the distance from UV light to plants from overhead, improving the growth of our system.

We continued our plans for two new grow beds: a hydroponic pipe-based growbed to further optimize our water use throughout the system, and a deeper grow bed to allow us to grow larger plants with deeper root systems. For the hydroponic system, we designed plant grow cups and novel water level height adjusters so that plants can grow in an ebb-and-flow system accommodating any system flow rate.


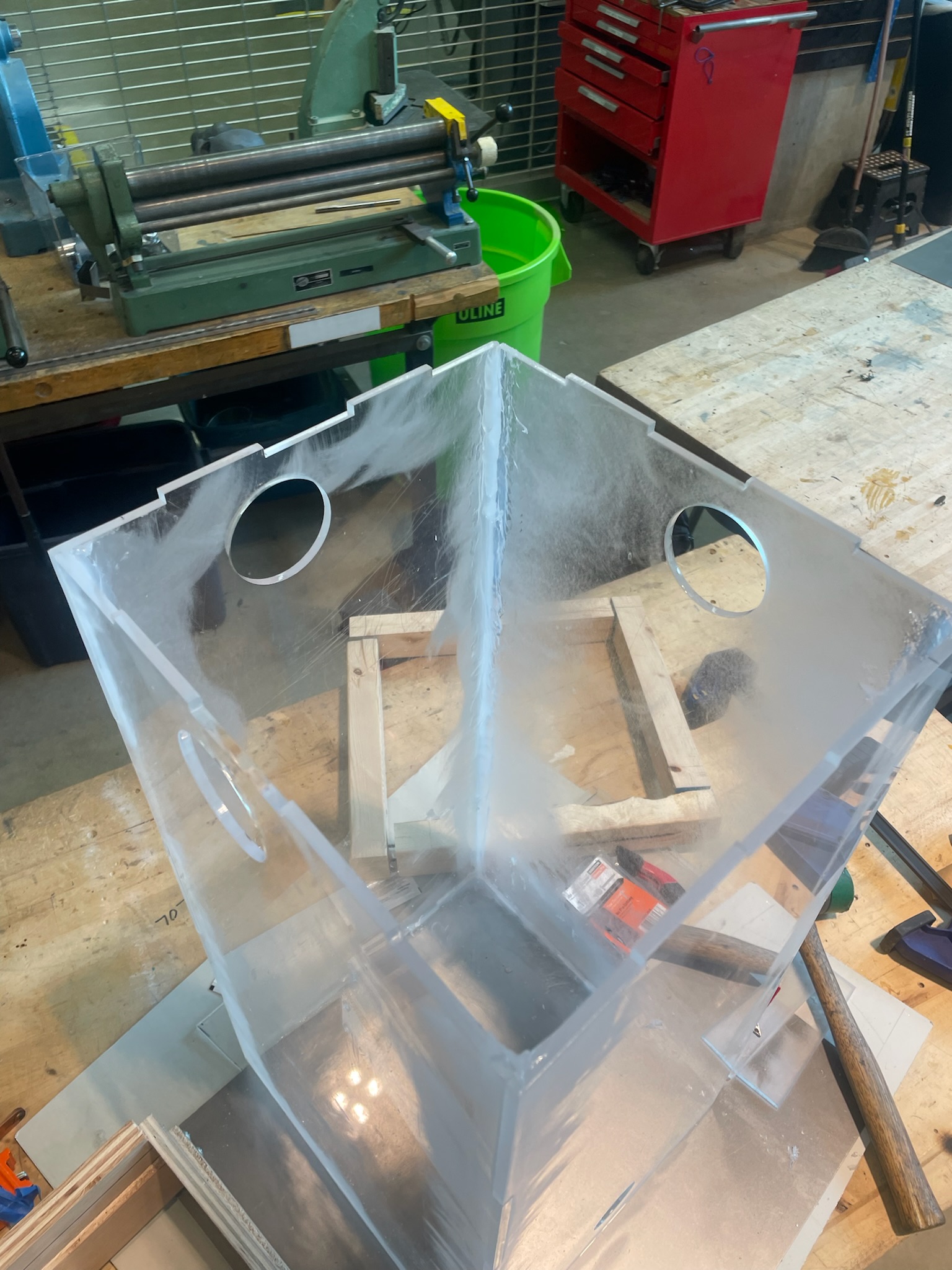
We also finally have a prototype for our new mechanical filtration box, which is now sealed and braced and is ready to be implemented. Lastly, we implemented a closed-loop feeding mechanism into the system, removing the need for external food sources. We have designed and prototyped a sustainable mealworm farming module, which separates mealworms, beetles, and eggs for processing into fish food.
Congratulations to Marcos Sanchez (our beloved PM), Spencer Huie, Lester Tai, Aymen Lamshael, and Lev Rosenberg for graduating! They will be sorely missed, but their contributions to this project live on!!
AutoAquaponics is headed by Kyan Shlipak (kyanshlipak2026@u.northwestern.edu) and Hannah Wilks (hannahwilks2026@u.northwestern.edu). You can find more information about AutoAquaponics on the ESW Project Database, where we post detailed quarterly blogs and an updated project summary. Keep an eye out for more news and feel free to reach out if you are interested in joining us!
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments